
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

স্টেপার মোটর এবং সার্ভো এবং সার্ভো মোটরগুলির মধ্যে পার্থক্য বোঝার জন্য একটি নিবন্ধ
I. স্টেপার মোটর এবং সার্ভো এবং সার্ভো মোটরের মধ্যে পার্থক্য
স্টেপার মোটর: ওপেন-লুপ কন্ট্রোল এলিমেন্ট স্টেপার মোটর অংশের কৌণিক স্থানচ্যুতি বা লাইন স্থানচ্যুতিতে বৈদ্যুতিক পালস সংকেত। সহজ কথায়, এটি কোণ এবং বাঁক সংখ্যা নিয়ন্ত্রণ করতে বৈদ্যুতিক পালস সংকেতের উপর নির্ভর করে। তাই তিনি কতটা ঘূর্ণন তা নির্ধারণ করতে শুধুমাত্র পালস সংকেতের উপর নির্ভর করেন। যেহেতু কোন সেন্সর নেই, স্টপিং এঙ্গেল বিচ্যুত হতে পারে। যাইহোক, সুনির্দিষ্ট পালস সংকেত বিচ্যুতি কমিয়ে দেয়।
সার্ভো মোটর: ঘূর্ণন অবস্থান নিয়ন্ত্রণ করতে সেন্সরের মাধ্যমে মোটরের গতি নিয়ন্ত্রণ করতে সার্ভো নিয়ন্ত্রণ সার্কিটের উপর নির্ভর করুন। তাই অবস্থান নিয়ন্ত্রণ খুবই সুনির্দিষ্ট। এবং ঘূর্ণন গতিও পরিবর্তনশীল।
সার্ভো (ইলেক্ট্রনিক সার্ভো): সার্ভোর প্রধান উপাদান হল সার্ভো মোটর। এতে সার্ভো মোটর কন্ট্রোল সার্কিট + রিডাকশন গিয়ার সেট রয়েছে। ওহ হ্যাঁ, সার্ভো মোটরের রিডাকশন গিয়ার সেট নেই। আর সার্ভোতে একটি রিডাকশন গিয়ার সেট রয়েছে।
লিমিট সার্ভোর ক্ষেত্রে, এটি আউটপুট শ্যাফ্টের নীচে একটি পটেনশিওমিটারের উপর নির্ভর করে রুডার বাহুর স্টিয়ারিং কোণ নির্ধারণ করতে। সার্ভো সিগন্যাল কন্ট্রোল হল একটি পালস উইডথ মড্যুলেটেড (PWM) সিগন্যাল, যেখানে একটি মাইক্রোকন্ট্রোলার সহজেই এই সিগন্যাল তৈরি করতে পারে।
২. স্টেপার মোটর মৌলিক নীতি
এটি কিভাবে কাজ করে:
সাধারণত একটি মোটরের রটার একটি স্থায়ী চুম্বক, এবং যখন কারেন্ট স্টেটর উইন্ডিংগুলির মধ্য দিয়ে প্রবাহিত হয়, তখন স্টেটর উইন্ডিংগুলি একটি ভেক্টর চৌম্বক ক্ষেত্র তৈরি করে। এই চৌম্বক ক্ষেত্রটি রটারকে একটি কোণ দ্বারা ঘোরানোর জন্য চালিত করবে, যাতে রটারের চৌম্বক ক্ষেত্রের জোড়ার দিকটি স্টেটরের চৌম্বক ক্ষেত্রের অভিমুখের মতোই হবে। যখন স্টেটরের ভেক্টর চৌম্বক ক্ষেত্র একটি কোণ দ্বারা ঘোরে। রটারটিও এই চৌম্বক ক্ষেত্রের সাথে একটি কোণ দ্বারা ঘোরে। প্রতিটি ইনপুট বৈদ্যুতিক স্পন্দনের জন্য, মোটরটি একটি কৌণিক ধাপ এগিয়ে ঘোরে। এর আউটপুট কৌণিক স্থানচ্যুতি ইনপুট ডালের সংখ্যার সমানুপাতিক, এবং এর ঘূর্ণন গতি ডালের ফ্রিকোয়েন্সির সমানুপাতিক। উইন্ডিংগুলিকে যে ক্রমানুসারে শক্তি দেওয়া হয় তা পরিবর্তন করে, মোটরটি বিপরীত হয়। অতএব, ডালের সংখ্যা এবং ফ্রিকোয়েন্সি এবং মোটরের প্রতিটি পর্বের উইন্ডিংগুলিকে শক্তিশালী করার ক্রম স্টেপার মোটরের ঘূর্ণন নিয়ন্ত্রণ করতে নিয়ন্ত্রণ করা যেতে পারে।
তাপ উৎপাদনের নীতি:
সাধারণত সব ধরণের মোটর দেখুন, অভ্যন্তরীণ হল আয়রন কোর এবং উইন্ডিং কয়েল। উইন্ডিং রেজিস্ট্যান্স, পাওয়ার লস, লস সাইজ এবং রেজিস্ট্যান্স উৎপন্ন করবে এবং কারেন্ট বর্গক্ষেত্রের সমানুপাতিক, যাকে প্রায়ই কপার লস বলা হয়, যদি কারেন্ট স্ট্যান্ডার্ড ডিসি বা সাইন ওয়েভ না হয়, তাও হারমোনিক লস তৈরি করবে; কোর হিস্টেরেসিস এডি কারেন্ট প্রভাব রয়েছে, বিকল্প চৌম্বক ক্ষেত্রেও ক্ষতি তৈরি করবে, উপাদানের আকার, কারেন্ট, ফ্রিকোয়েন্সি, ভোল্টেজ সম্পর্কিত, যা আয়রন লস বলে। তামার ক্ষয় এবং লোহার ক্ষতি তাপ উত্পাদনের আকারে প্রকাশ পাবে, এইভাবে মোটরের কার্যকারিতা প্রভাবিত করবে। স্টেপিং মোটর সাধারণত অবস্থান নির্ভুলতা এবং ঘূর্ণন সঁচারক বল আউটপুট অনুসরণ করে, দক্ষতা তুলনামূলকভাবে কম, কারেন্ট সাধারণত বড়, এবং হারমোনিক উপাদানগুলি বেশি, গতি এবং পরিবর্তনের সাথে কারেন্টের ফ্রিকোয়েন্সি পর্যায়ক্রমে, তাই স্টেপিং মোটরগুলিতে সাধারণত একটি তাপ পরিস্থিতি থাকে এবং সাধারণ এসি মোটরের তুলনায় পরিস্থিতি আরও গুরুতর।
III. রাডার নির্মাণ
সার্ভো প্রধানত একটি হাউজিং, একটি সার্কিট বোর্ড, একটি ড্রাইভ মোটর, একটি গিয়ার রিডুসার এবং একটি অবস্থান সনাক্তকরণ উপাদান নিয়ে গঠিত। এর কার্যকারী নীতি হল যে রিসিভার সার্ভোতে একটি সংকেত পাঠায় এবং সার্কিট বোর্ডের IC কোরলেস মোটরটিকে ঘূর্ণন শুরু করার জন্য চালিত করে, এবং শক্তি হ্রাস গিয়ারের মাধ্যমে সুইং আর্মে প্রেরণ করা হয় এবং একই সময়ে, অবস্থান সনাক্তকারী একটি সংকেত ফেরত পাঠায় যে এটি অবস্থানে এসেছে কিনা তা নির্ধারণ করতে। পজিশন ডিটেক্টর আসলে একটি পরিবর্তনশীল প্রতিরোধক। যখন সার্ভো ঘোরে, তখন রোধের মান সেই অনুযায়ী পরিবর্তিত হবে এবং রোধের মান সনাক্ত করে ঘূর্ণনের কোণ জানা যাবে। সাধারণ সার্ভো মোটর হল একটি পাতলা তামার তার যা একটি তিন-মেরু রটারের চারপাশে আবৃত থাকে, যখন কয়েলের মধ্য দিয়ে বিদ্যুৎ প্রবাহিত হয় তখন একটি চৌম্বক ক্ষেত্র তৈরি হয় এবং রটার চুম্বকের পরিধি বিকর্ষণ তৈরি করে, যা ঘূর্ণনের বল তৈরি করে। পদার্থবিজ্ঞান অনুসারে, বস্তুর জড়তার মুহূর্ত তার ভরের সাথে সরাসরি সমানুপাতিক, তাই বস্তুর ভর যত বেশি ঘোরানো হবে, তত বেশি বল প্রয়োজন। দ্রুত ঘূর্ণন গতি এবং কম বিদ্যুত খরচ অর্জনের জন্য, সার্ভো একটি পাতলা ঠালা সিলিন্ডারে পেঁচানো পাতলা তামার তার দিয়ে তৈরি, কোন খুঁটি ছাড়াই একটি খুব হালকা ফাঁপা রটার তৈরি করে, এবং চুম্বকগুলি সিলিন্ডারের ভিতরে স্থাপন করা হয়, যা হোলো কাপ মোটর।
বিভিন্ন কাজের পরিবেশের জন্য, জলরোধী এবং ধুলোরোধী ডিজাইন সহ সার্ভো রয়েছে; এবং বিভিন্ন লোডের প্রয়োজনীয়তার প্রতিক্রিয়া হিসাবে, সার্ভোগুলির জন্য প্লাস্টিক এবং ধাতব গিয়ার রয়েছে এবং সার্ভোগুলির জন্য ধাতব গিয়ারগুলি সাধারণত উচ্চ-টর্ক এবং উচ্চ-গতির হয়, এই সুবিধাটি যে অতিরিক্ত লোডের কারণে গিয়ারগুলি চিপ করা হবে না। ঘূর্ণন দ্রুত এবং আরো নির্ভুল করতে উচ্চ গ্রেড সার্ভো বল বিয়ারিং দিয়ে সজ্জিত করা হবে। একটি বল বিয়ারিং এবং দুটি বল বিয়ারিংয়ের মধ্যে পার্থক্য রয়েছে, অবশ্যই দুটি বল বিয়ারিংই ভালো। নতুন FET servos প্রধানত FET (ফিল্ড ইফেক্ট ট্রানজিস্টর) ব্যবহার করছে, যার কম অভ্যন্তরীণ প্রতিরোধের সুবিধা রয়েছে এবং তাই স্বাভাবিক ট্রানজিস্টরের তুলনায় কম কারেন্ট লস।
IV অপারেশন সার্ভো নীতি
পিডব্লিউএম তরঙ্গ থেকে অভ্যন্তরীণ সার্কিটে একটি পক্ষপাত ভোল্টেজ তৈরি করতে, যোগাযোগকারী জেনারেটরটি হ্রাস গিয়ারের মাধ্যমে পটেনটিওমিটারকে চালিত করতে চালনা করে, যাতে যখন ভোল্টেজের পার্থক্য শূন্য হয়, তখন মোটর বন্ধ হয়ে যায়, যাতে সার্ভোর প্রভাব অর্জন করা যায়।
সার্ভো পিডব্লিউএম-এর প্রোটোকলগুলি সব একই, তবে সাম্প্রতিকতম সার্ভোগুলি ভিন্ন হতে পারে।
প্রোটোকল সাধারণত: 0.5ms ~ 2.5ms মধ্যে উচ্চ স্তরের প্রস্থ বিভিন্ন কোণ মাধ্যমে ঘুরতে servo নিয়ন্ত্রণ করতে.
V. সার্ভো মোটর কিভাবে কাজ করে
নীচের চিত্রটি একটি পাওয়ার অপারেশনাল এমপ্লিফায়ার LM675 দিয়ে তৈরি একটি সার্ভো মোটর নিয়ন্ত্রণ সার্কিট দেখায় এবং মোটরটি একটি ডিসি সার্ভো মোটর। চিত্র থেকে দেখা যায়, পাওয়ার অপারেশনাল এমপ্লিফায়ার LM675 15V দ্বারা সরবরাহ করা হয়, এবং 15V ভোল্টেজ RP 1 এর মাধ্যমে অপারেশনাল এমপ্লিফায়ার LM675-এর ইন-ফেজ ইনপুটে যোগ করা হয়, এবং LM675-এর আউটপুট ভোল্টেজ moservotor-এর ইনপুটে যোগ করা হয়। মোটরটি মোটর গতির রিয়েল-টাইম সনাক্তকরণের জন্য একটি গতি পরিমাপ সংকেত জেনারেটর দিয়ে সজ্জিত। আসলে, গতি সংকেত জেনারেটর এক ধরনের জেনারেটর, এবং এর আউটপুট ভোল্টেজ ঘূর্ণন গতির সমানুপাতিক। গতি পরিমাপক সংকেত জেনারেটর G থেকে ভোল্টেজ আউটপুট একটি ভোল্টেজ বিভাজক সার্কিটের পরে গতি ত্রুটি সংকেত হিসাবে অপারেশনাল এমপ্লিফায়ারের ইনভার্টিং ইনপুটে ফেরত দেওয়া হয়। গতি কমান্ড potentiometer RP1 দ্বারা সেট করা ভোল্টেজ মান R1.R2 দ্বারা ভোল্টেজ বিভাজনের পরে অপারেশনাল এমপ্লিফায়ারের ইন-ফেজ ইনপুটে যোগ করা হয়, যা রেফারেন্স ভোল্টেজের সমতুল্য।
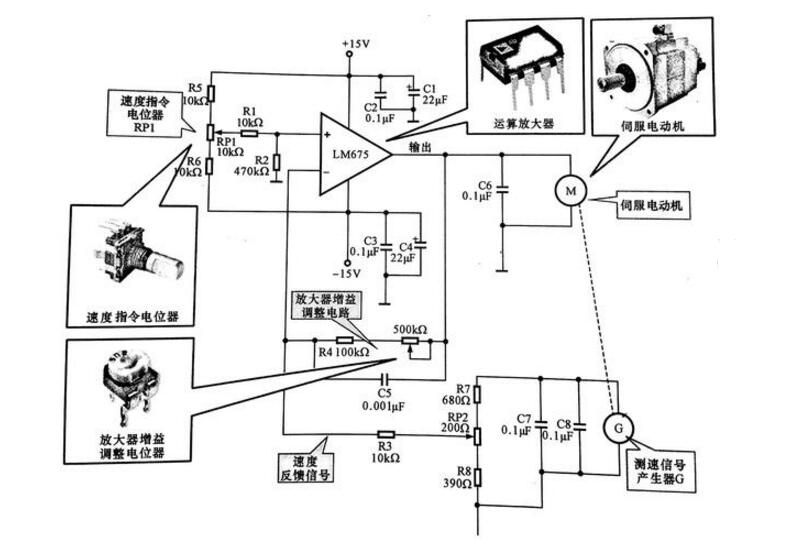
সার্ভো মোটরের পরিকল্পিত নিয়ন্ত্রণ
সার্ভোমোটর: সার্ভোমোটরের জন্য এম অক্ষর দ্বারা নির্দেশিত, এটি ড্রাইভ সিস্টেমের শক্তির উত্স। অপারেশনাল এমপ্লিফায়ার: সার্কিট নাম দ্বারা চিহ্নিত, যেমন, LM675, সার্ভো কন্ট্রোল সার্কিটের একটি পরিবর্ধক অংশ যা সার্ভো মোটরের জন্য ড্রাইভ কারেন্ট প্রদান করে।
স্পীড কমান্ড potentiometer RP1: সার্কিটে অপারেশনাল এমপ্লিফায়ারের রেফারেন্স ভোল্টেজ সেট করে, অর্থাৎ গতি সেটিং। অ্যামপ্লিফায়ার গেইন অ্যাডজাস্টমেন্ট পটেনশিওমিটার RP2: সার্কিটে যথাক্রমে অ্যামপ্লিফায়ার গেইন এবং গতি ফিডব্যাক সিগন্যালের আকার ঠিক করতে ব্যবহৃত হয়।
যখন মোটরের লোড পরিবর্তিত হয়, তখন অপারেশনাল অ্যামপ্লিফায়ারের ইনভার্টেড ইনপুটে খাওয়ানো ভোল্টেজও পরিবর্তিত হয়, অর্থাৎ, যখন মোটরের লোড বাড়ানো হয়, তখন গতি কমে যায় এবং স্পিড সিগন্যাল জেনারেটরের আউটপুট ভোল্টেজও কমে যায়, যাতে ভোল্টেজ এবং অপারেশনাল অ্যাম্প্লিফায়ারের ইনভার্টেড ইনপুটে ভোল্টেজ এবং অপারেশনাল অ্যাম্পলিফায়ারের মধ্যে পার্থক্য কমে যায়। রেফারেন্স ভোল্টেজ বৃদ্ধি পায় এবং অপারেশনাল এমপ্লিফায়ারের আউটপুট ভোল্টেজ বৃদ্ধি পায়। বিপরীতভাবে, যখন লোড ছোট হয়ে যায় এবং মোটরের গতি বৃদ্ধি পায়, গতি পরিমাপক সংকেত জেনারেটরের আউটপুট ভোল্টেজ বেড়ে যায়, অপারেশনাল এমপ্লিফায়ারের ইনভার্টেড ইনপুটে যোগ করা ফিডব্যাক ভোল্টেজ বৃদ্ধি পায়, এই ভোল্টেজ এবং রেফারেন্স ভোল্টেজের মধ্যে পার্থক্য হ্রাস পায়, আউটপুট ভোল্টেজ হ্রাস পায় এবং অপারেশনাল এমপ্লিফায়ারের ভোল্টেজ হ্রাস পায়। তদনুসারে, যাতে ঘূর্ণন গতি স্বয়ংক্রিয়ভাবে সেট মানতে স্থিতিশীল হতে পারে।
অনুসন্ধান পাঠান



X
আমরা আপনাকে একটি ভাল ব্রাউজিং অভিজ্ঞতা দিতে, সাইটের ট্র্যাফিক বিশ্লেষণ করতে এবং সামগ্রী ব্যক্তিগতকৃত করতে কুকিজ ব্যবহার করি। এই সাইটটি ব্যবহার করে, আপনি আমাদের কুকিজ ব্যবহারে সম্মত হন।
গোপনীয়তা নীতি